Power Line Following with Autonomous UAVs using MmWave Radar
Introduction
This work proposes a novel drone system designed to autonomously follow power lines and reconstruct them in 3D with a point cloud representation based on mmWave radar measurements. The system is composed of a GPS-enabled quadrotor UAV equipped with a combined mmWave radar sensor and onboard compute module payload and has been designed to be small, lightweight, and low-cost.
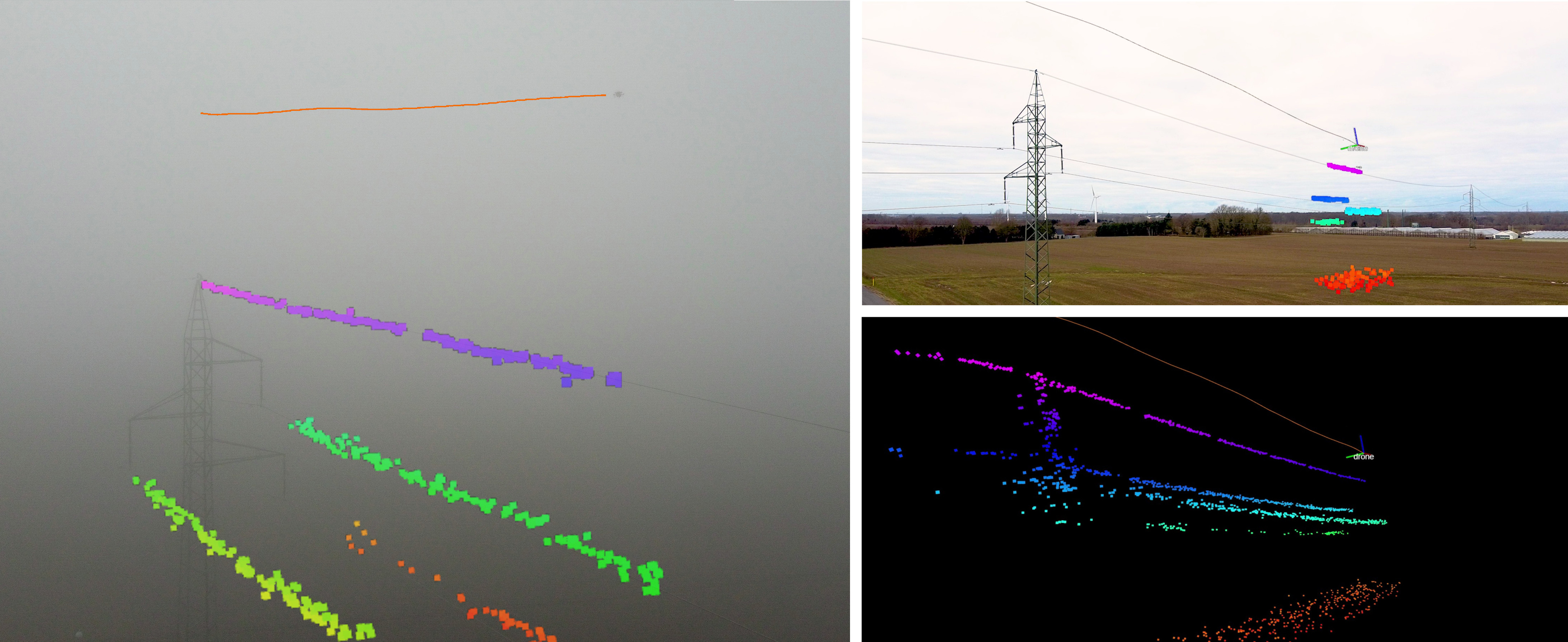
MmWave radar sensors offer great range and sensitivity in the task of power line detection at the cost of sparsity in the produced data when compared to traditional sensors such as LiDARs. The proposed system overcomes the radar sensor's shortcomings by building up a large point cloud representing the power line environment as the drone moves around in it. The built-up point cloud is analyzed using the onboard computer to detect the cables in the power line environment and to produce pose-estimates of each line.
The system has been tested in a variety of scenarios and has been shown to be able to accurately detect and follow power lines, even in varying weather conditions. Additionally, the 3D reconstruction generated by the perception scheme may be useful for power line inspections and maintenance planning.